首頁 / 自我成長 / 控制論是什麼?用「感測→比較→修正」達成目標
控制論是什麼?用「感測→比較→修正」達成目標
- 控制論是一條不斷往目標收斂的「持續性過程」:控制 = 目標 − 現況 → 回饋 → 修正;進步 = 回饋密度 × 修正速度。
你是否有過,想要達成一個目標,來來回回試了 5-6 次,總是放棄,又重起專案,又放棄......進度始終沒推進?像是想要健身、寫小說,或是規劃什麼副業,起了開頭就沒後續,直到隔年,又重新找回了抱負,立了個同樣的目標。然後呢?又沒後續,一直重複這個循環。
這種感覺,老實說很糟糕,並且會陷入習得性無助 —— 你沒招了,也不知道有誰能幫助你,你只知道你一直在失敗、失敗、失敗,這讓你進一步懷疑自己。
像是:我是否是個永遠的失敗者、我好像沒有把事情做成的經驗、我不知道到底要怎樣才能成功。似乎自己做什麼事都無法成功,為自己貼了個「失敗者」的標籤。
這也會讓你不敢承諾、不敢立新目標,反正列了也無法達成,目標也是列心酸的,何必列呢?這是個詛咒。
我不曉得我從什麼時候開始,掙脫了這道詛咒,雖然我一樣沒養成健身習慣,沒去執行我夢想好久的小說家計劃,也沒賺到很多錢,但我也達成了一個小目標 —— 出了一本,我以前覺得非常困難的《思維複製寫作術》書。就是說,我終於有了一次將「大型專案」完成的經驗了。
這也讓我好奇,為什麼我們總是達不成目標,或者說,達成目標這事,是有方法論能學的嗎,是可以用第一性原理推導的嗎?有的。我研究後發現,「控制論」就是達成目標的方法論。
控制論是什麼?
控制論(Cybernetics)這詞,是由美國數學家諾伯特·維納(Norbert Wiener)在 1948 年出版的同名著作《控制論》中確立的。當時他們在研究防空導彈的自動追蹤系統,結果發現機器追蹤目標的修正過程,竟然與人控制肌肉去拿一杯水的運作,在數學上完全一樣,於是維納將這門研究「動物與機器內部控制與通訊」的學問,命名為控制論。
那麼,你應該會好奇,機器追蹤目標的過程,在數學上是長什麼樣子?以防空飛彈追蹤敵機作為例子,過程如下:
- 感測:飛機上的雷達會不斷偵測兩個資訊:飛彈目前的飛行軌跡,以及敵機目前的位置
- 計算偏差:飛彈內部的計算機,會將「目前軌跡」與「擊中敵機所需的理想軌跡」做比對,計算兩者的誤差值
- 修正:飛彈的控制系統,根據這誤差值啟動推進器或調整尾翼,來改變飛行方向,縮小誤差。
- 持續循環:因為敵機不是笨蛋,他會一直閃避,所以雷達會需要立刻進行下一輪掃描,重新計算新的誤差。這個「感測→比較→修正」的過程會不斷重複,直到誤差歸零(擊中目標)。
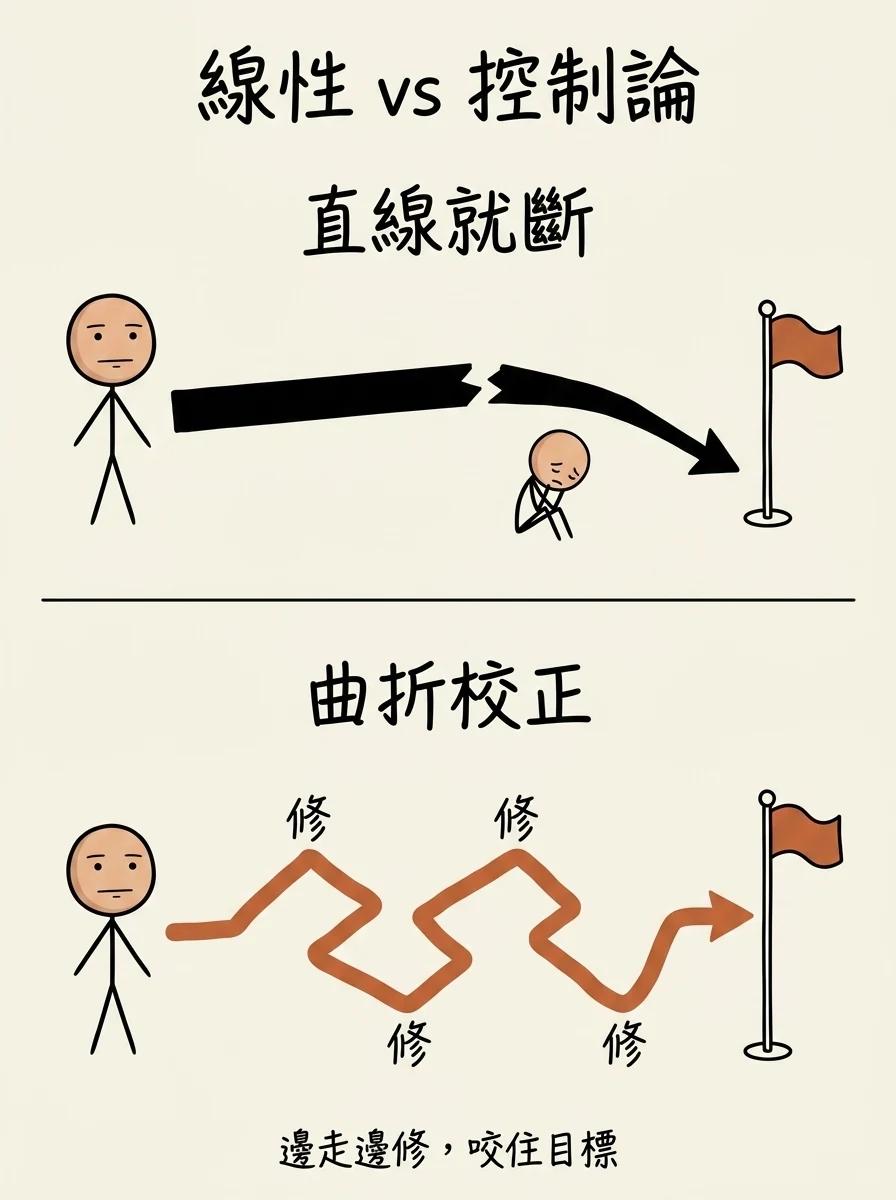
所以你可以理解為,控制論是一條不斷往目標收斂的「持續性過程」。你看,這跟我們以往的觀點有很大的不同,我們人腦的認知模式是線性的 —— 我訂了個目標,規劃一個完美的企劃,就像畫一條直線一樣,我每天就是按部就班執行,但一旦目標偏離,或是中間出現什麼挫折或意外,計劃不好使了,我們沒有反脆弱性,就是沒招了。無法根據反饋修正,就只能擺爛,不做了。
這也是為什麼我們執行計劃,總是無法持續的原因。
而控制論更像是在「曲折中掙扎」,是個偏執狂,不管目標如何變動,就是緊咬不放 —— 執行一小段後,發現錯誤,找出偏差、修正、再對齊目標一次、給出新方案,執行、再修正的過程。以公式表示:「控制 = 目標 − 現況 → 回饋 → 修正」。其中,「進步 = 回饋密度 × 修正速度」。你只要偵測的夠勤,越快找出差值,並越快修正,你就能死咬住住目標,不偏移。
為什麼你總是卡關?艾什比定律
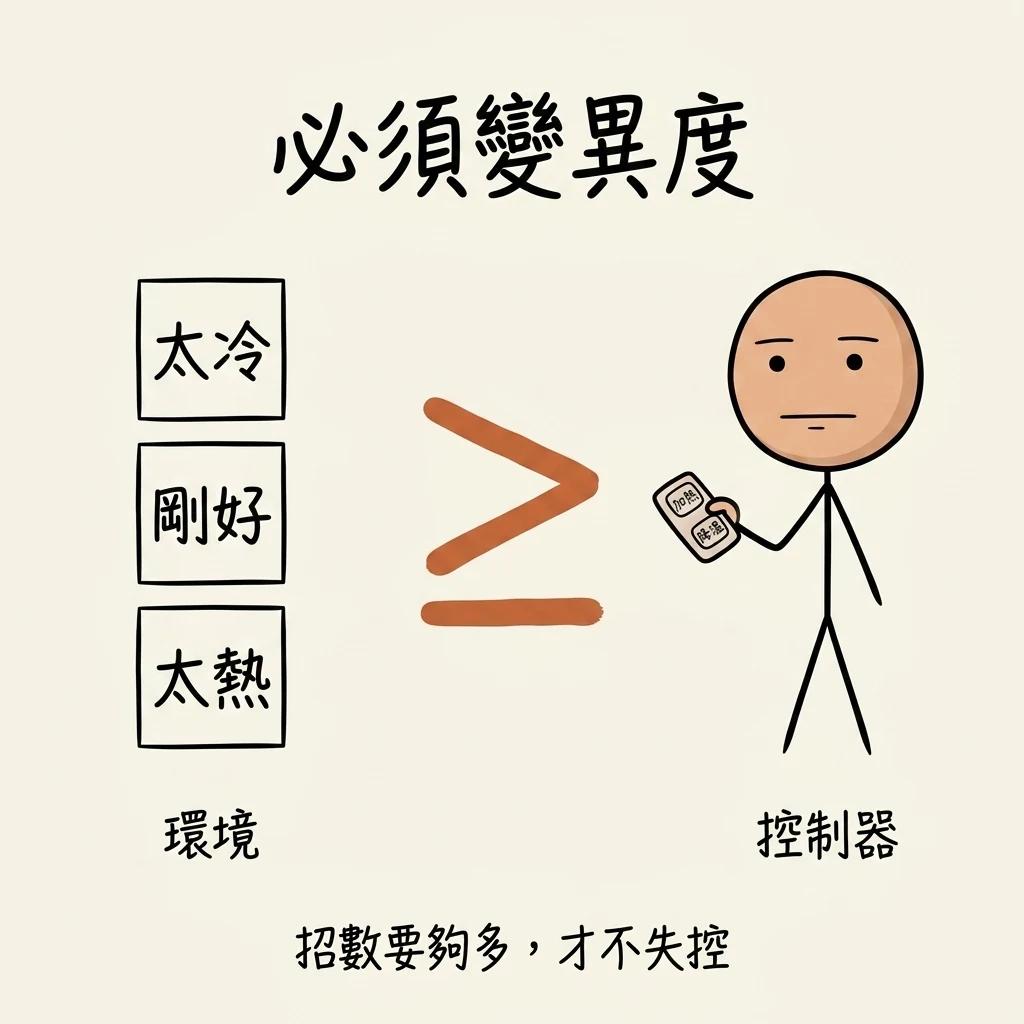
控制論裡有一個著名觀點是「艾什比定律」,也稱「必須變異度定律」。這個定義的邏輯是「只有變異才能對付變異」。就是說,控制器的「行動狀態總數」必須大於或等於環境的「問題狀態總數」,否則系統就會出現盲區,走向失控。
那什麼是變異度呢?就是指系統「可能出現的、可區別的不同狀態的總數」。比如說:電燈開關只有「開」和「關」兩種狀態,所以變異度是 2;一個骰子,擲出去後的可能有 6 種,所以變異度是 6。所以在艾什比定律的框架下,我們需要對比環境和控制器的變異度:環境變異度(系統可能面臨的所有不同干擾、問題或狀態的總數)、控制器變異度(控制器能夠做出的不同應對措施或行動的總數)。
舉個簡單的例子,假設屋子太熱了,我們想要調到 22 度,那冷氣感測器會將溫度變化簡化為三種狀態:「太冷」、「剛剛好」和「太熱」。那我們的空調系統,至少要具備幾種行動變異度,才能對應並穩定溫度目標呢?三種。太冷 → 加熱;剛剛好 → 維持不變;太熱 → 降溫。
如果說溫度剛剛好,不用動作,那你去看冷氣遙控器,剩下的太冷和太熱,這兩個變異度,就至少要有 2 個按鈕,這就剛好對應到了溫度調上和調下的按鈕,少了任何一個,這遙控器就不能用了。
而根據「艾什比定律」,我們之所以容易卡關,是因為我們在設立新目標時,由於沒經驗,所面對的都是未知的,就相當於是把你丟到一個充滿「高變異度的環境中」,而自身的處理方式又是一成不變(自身變異度不足),所以每次遇到意外,系統就會卡關。為了掌控控制權,從邏輯上,我們只有兩條路可走:
策略一:簡化問題(減少系統的變異度)。如果外在環境太複雜,那就建立規則或過濾機制,把不需要處理的變化擋在門外。例如,建立標準作業流程 SOP,設定嚴格客戶篩選門檻,或直接拒絕高風險專案,或減少產品品項。
策略二:強化自身能力(放大控制者變異度)。既然環境無法改變,那就得增加自己手上的牌。你必須去學習新技能、改變舊習慣、嘗試新策略。像是引進自動化工具、AI,或學習跨領域知識。
舉個例子,以交通控制系統來說,一個十字路口的車流、車速、駕駛人的反應都是變異度。為了減少出車禍,可以這樣下手:減少系統的變異度(設立限速標誌、畫單行道、禁止左轉,這能將車子的行為變異砍半);放大控制者變異度(拓寬車道,或是使用 AI 動態調整紅綠燈)。
不過,你看到這裡,可能會好奇,為什麼要以「變異對付變異」,而不能像李小龍所說的「以一招對應萬招」呢?
因為在複雜系統中,每一個特定的問題狀態,通常需要一個特定的解決狀態來抵銷。像是說,如果不管客戶是抱怨價格、抱怨品質、還是抱怨態度,客服都是雷打不動的回答同一句「很抱歉造成您的困擾」,這只會讓人覺得敷衍,沒被回答到。
像是你問:「為什麼這牛肉麵有酸味,是不是發臭了?」他回:「很抱歉造成您的困擾」;你再說:「你可以叫店長來嗎?這真的有點問題,我肚子不舒服」,他再回:「很抱歉造成您的困擾」;你再說:「快叫你店長來啦」,他回:「很抱歉造成您的困擾」;你說:「你是不是只會說同一句話阿,X$%!D......」,他回:「很抱歉造成您的困擾」。
單一回答,會產生盲區,而那些未被處理的變異,會在系統內部積累,最終引爆。

// 讀到這,先存個檔
控制論,一鍵打包為 Notion 模板
重點濃縮 + 動手檢查表,留個 email,我直接寄一份可直接套用的版本給你。
P.S. 一週寄一封電子報,不喜歡退訂兩秒鐘 ✏️
二階控制論是什麼?
早期的控制論(一階),探討的是「被觀察的系統」,假設觀察者是獨立在外的,就好像是觀察囚犯的偵探一樣,你面前的是一面「單向鏡」,你可以看到囚犯對偵查官提出問題後,所產生的反應,你在外面看,不會對他產生干擾。但到了 1970 年代,學者們提出了二階控制論,也就是「觀察系統的系統」。
這概念是說,當系統複雜到一定程度後(特別是涉及人類、社會、生態),客觀性就不存在了 —— 當你試圖觀察、介入一個系統時,你的介入行為,本身就改變了那個系統。也就是說,你無法客觀的站在系統之外,觀察者本身也是系統的一部分。
這就相當於是,很多人在旁邊圍觀囚犯被審問,那囚犯會緊張,會影響回答狀態。
又或是像黃仁勳的開會智慧一樣:開會時老闆要最後發言。因為老闆如果先發言,那下屬會服從權威,以老闆意見為定向,那就沒其它意見,也就聽不到真話了。所以黃仁勳相當於是在開會時,把自身這個變數也算進去。
而當你理解了觀察者本身也是系統的一部分後,會衍生出幾個顛覆性的推論:
1. 激進建構主義:為何沒有客觀真相? 既然你無法站在系統外觀察,那你對環境的任何觀察和觸碰,其實都已經沾染上了「你」這個變數。就像戴上紅色墨鏡看世界一樣,世界就是紅色的。我們所接收到的任何外部信息,都得先經過一層濾鏡 —— 你的大腦、感官、過往經驗 —— 所以你感知的不是客觀現實,是我們經過大腦和感官「編碼與解讀」後的版本。所以我們對問題的診斷,反映的是自身的思維盲點,不是問題本身。
2. 自創生:為何系統無法被外部控制? 你的介入會改變系統(囚犯會因為你的出現而緊張)。為什麼囚犯會緊張?因為囚犯不是一台「輸入 A 就輸出 B」的機器,他是一個有自我意識的系統。在一階控制論裡,我們把系統當作是無生命的機器(按按鈕就會啟動),但在二接控制論裡,活的系統(如細胞、人類、組織)其內部運作是「封閉」的。它們吸收外部資訊,最終目的是為了「維持自己的內部秩序和生存」。所以你無法真正「控制」另一個生命,你只能刺激它,當你給出一個指令,對這生命系統來說只是個環境刺激,而至於他會怎麼行動,給出什麼反應,是他自己內部決定的。
3. 共同演化:為何只能對話與互動? 根據前一點,既然你們都在同一個系統裡,你發出一個動作(刺激),對方根據自己的內部邏輯做出反應,這反應又反過來變成了對你的「刺激」,迫使你調整自己的認知和下一步行動。這是一個無限循環的雙向回饋迴路。在互相刺激、互相適應的過程中,狀態是交織在一起的,你無法控制別人,你只能與他人共同演化。無論是管理團隊、教育孩子還是跟伴侶相處,你唯一能做的就是「拋出善意的刺激 → 觀察對方的真實回饋 → 調整自己的認知 → 再拋出新的刺激」。
簡單來說,二階控制論,是將我們從「冷眼旁觀的操控者」上拉了下來,讓我們意識到,自己只是「身在此局,互相影響的參與者」。
怎麼用控制論改寫自己的內部迴圈?
過去我們談自我成長,談改變,往往都在強調「自律」或是「意志力」。但如果從控制論的角度看,改變不是藉由外部力量,拿大鐵錘敲壞原有的自己,更像是一個精密的工程師,去重寫內部的回饋迴圈。
1. 為什麼你總是被打回原型? 當你決定「明天要每天早起健身」或「要戒掉滑手機」時,你往往撐不過一個禮拜。這時你會對自己說:「我是個意志薄弱的人」。但控制論的邏輯是:是你體內的「衡定性」機制在完美運作。作為一個「自創生」系統,我們的作息習慣,是系統為了維持某種平衡(例如釋放壓力,獲得安全感)所建立的「完美迴圈」,而當你突然強加一個巨大的改變(每天早起),那系統會判定這是「外部威脅」,並啟動強大的負回饋機制(讓你感到疲倦,情緒低落),來將你拉回原狀態。所以要改變,不能做 180 度大轉彎。相反的,得設計出那種不會觸發「系統警報」的微小行動。與其說每早六點起床,不如設定「每天比昨天早 15 分鐘睡覺」。只要這微小的輸入不被系統排斥,就會慢慢融進你的自創生結構中。
2. 掌握行為與情緒的彈性。根據艾什比定律,如果現實生活的挑戰(變異度)高,而你應對挫折的方法只有一種—— 例如遇到壓力,就靠大吃大喝來紓解,那系統就會失控。而自我成長的本質,就是不斷的擴大自身的變異度,例如學習不同的心智模型、換位思考,或是重新框架的能力。這樣當遇到同一個挫折時,如果你能切換成三種視角審視它,等於你的變異度就放大了三倍。
3. 設計「負回饋迴圈」。如同追蹤導彈,你所設定的目標(例如:擁有強壯身體、完成一項專案)就是你的理想座標。但只有目標是不夠的,因為如果飛彈沒有雷達去比對誤差,那他永遠打不到目標。所以很多人改變失敗(包含我),是因為它們只有「輸入(行動)」,卻沒有「測量誤差」的機制。例如每天、每週覆盤。問自己:「我今天的實際軌跡,與理想軌跡之間的『誤差值』是多少?我明天該如何微調行動來縮小這個誤差?」像是目標一週減 0.5kg,你做了運動和飲食控制,晚上量體重時,發現只減了 0.2 kg,那就要更改原計劃,增加運動時間或是更嚴格控制飲食。
4. 成為自己的觀察者。這是最高階的心法。當你在改變過程遇到阻力,或情緒崩潰時,不要跟那個情緒對抗。觀察者即系統。你需要後退一步,把那個「正在感到挫折的自己」,也列為觀察對象。所以與其說:「我又失敗了,我好糟糕」。不如切換成二階視角:「我觀察到,『我這個系統』目前正產生焦慮,並試圖放棄。」當你跳出被情緒控制的黑箱後,就等於重新奪回了系統工程師的權限。
改變自己,其實就是一場「觀察原有迴圈 → 擴充變異度 → 建立新回饋 → 系統重新穩定」的動態遊戲。
動手做:把控制論的迴圈,套到你正在卡關的那件事上
複習完了,現在輪到你動手。原文講的是方法論,這裡讓你把控制論的迴圈,套到自己正在卡關的那件事上。
步驟一:先承認你卡在哪
把你試了好幾次都放棄的那件事寫下來,看看你中的狀況:訂了完美計畫,但一偏離就沒招、直接擺爛;只有「做」這個動作,沒有任何測量誤差的機制;面對的是全新領域(高變異度),但應對方式一成不變;一改變就很快被打回原型、撐不過一個禮拜;一失敗就罵自己「我是個失敗者」、跟情緒對抗。寫下那件事,再挑出你最中的那一項。
步驟二:負回饋迴圈設計表
很多人改變失敗,是因為只有「輸入(行動)」,卻沒有「測量誤差」的機制。照導彈追蹤的四步,給你的目標裝上迴圈:理想座標、感測、比較、修正。照原文範例——目標一週減 0.5kg,晚上量體重發現只減 0.2kg,就增加運動時間或更嚴格控飲食。感測一定要排進每日/每週覆盤,沒有雷達,飛彈永遠打不到目標。
步驟三:變異度盤點表
照艾什比定律,盤點你面對的環境變異度,和你手上的應對方式夠不夠。如果你遇到壓力只會大吃大喝這一招,系統就會失控。自我成長的本質就是不斷擴大自身變異度——多學一種心智模型、多一種換位思考,遇到同一個挫折能切換三種視角,變異度就放大三倍。
步驟四:設計不觸發警報的微小行動
照控制論,要改變不能做 180 度大轉彎,否則系統會判定是外部威脅、把你拉回原狀。把你原本想做的大改變(例如每天六點起床健身),砍成一個小到不會觸發警報的版本(例如每天比昨天早 15 分鐘睡)。只要這微小的輸入不被系統排斥,就會慢慢融進你的結構裡。
步驟五:成為自己的觀察者(每週覆盤)
這是最高階的心法——當你遇到阻力或情緒崩潰時,不要跟情緒對抗,後退一步,把那個正在挫折的自己也列為觀察對象。每週回答這三題:這週我的實際軌跡與理想軌跡之間的誤差值大概是多少?我明天/下週該如何微調行動來縮小這個誤差?這週我有沒有切換成二階視角——把「我又失敗了」換成「我觀察到我這個系統正在產生焦慮」?當你跳出被情緒控制的黑箱,就等於重新奪回了系統工程師的權限。
負回饋迴圈設計表
| 迴圈環節 | 填寫提示 |
|---|---|
| 理想座標(我要的目標,具體可量) | 例:一週減 0.5kg |
| 感測(我多久量一次現況?用什麼量?) | 例:每晚量體重 |
| 比較(理想與現況之間的誤差怎麼算?) | 例:這週只減 0.2kg,差 0.3kg |
| 修正(誤差大時,我下一步具體微調什麼?) | 例:增加運動時間或更嚴格控飲食 |
變異度盤點表
| 我會遇到的問題狀況(環境變異度) | 我目前的應對方式 | 我還缺哪種應對(要補的變異度) |
|---|---|---|
| 例:遇到壓力 | 大吃大喝 | 運動、找人聊、寫下來拆解 |
// 把這篇帶著走
控制論,一鍵打包為 Notion 模板
重點濃縮 + 動手檢查表,留個 email,我直接寄一份可直接套用的版本給你。
P.S. 一週寄一封電子報,不喜歡退訂兩秒鐘 ✏️